|
|
 |
Dynamic
Programming
Data |
 |
-
Walk: Deterministic Dynamic Programming |
|
For the deterministic
dynamic programming model we drop the random from the title,
because the moves are not random
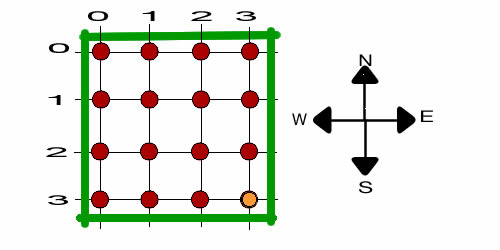
in this case. The walker must follow a path to a designated
terminal node. The goal is to find the path that is least expensive.
The problem might be more accurately called the grid-walk problem
because the walker is restricted to the grid lines.
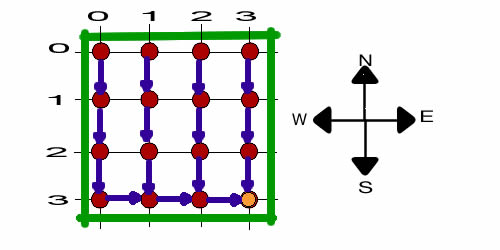
This model has no probabilities, but only costs. A single
terminating state is provided by the data with a cost of -100.
The goal of the optimization is to minimize the total solution
cost. This is the shortest path tree problem, terminating at
a single state. For the example, the final state is (3, 3).
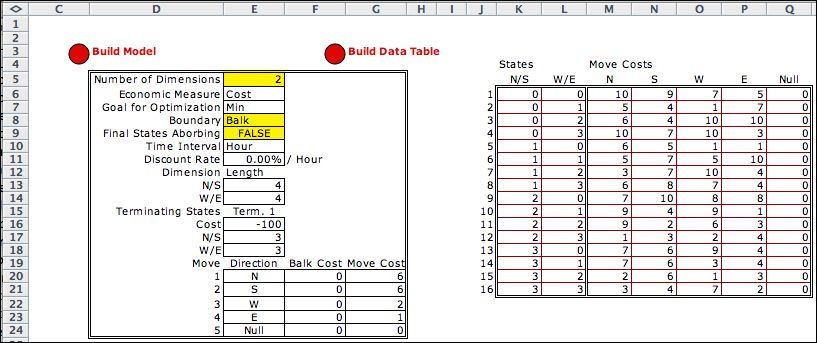
We have zeroed the balk costs, so only the move costs are relevant.
Since the cost is negative at the terminal node (actually a
reward), the solution will seek the set of shortest paths from
every node to (3, 3). To illustrate a
matrix presentation of the move costs, we have used the Build
Data Table option. The numbers shown in the table were
randomly generated. The model uses the tabular data rather
than the move costs in column G.
|
States and Action |
| |
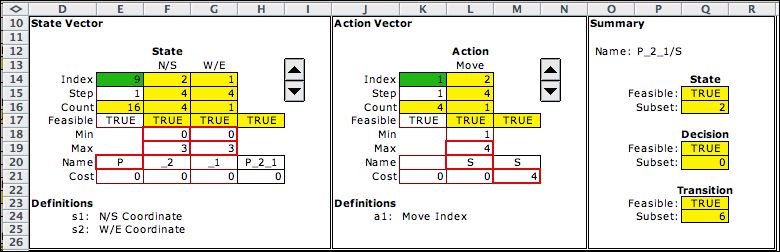
To create the DP Model, click
on the Build Model button. Rather than the event element
of the Markov Chain, the deterministic DP model has an action element.
The decision moves the walker from one state to another. The
state shown below is (2, 1) and the current action is to move
south. The action element has a cost, but not a probability.
The cost in cell M21 is a reference to the data table that
uses the state index in E14 and the move index in K14 to select
the appropriate cost. |
| |
|
| |
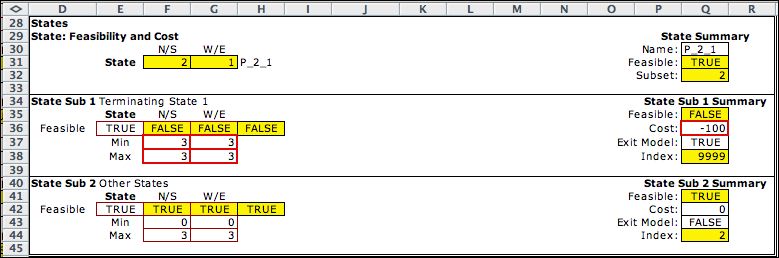
The model has a new component, the State
Subset. We use the first subset to define the terminating
state. The first subset is true only for the state (3, 3).
This is designated as a terminal state, and the cost of encountering
the state is -100. We use this negative cost to specify an
award for reaching the terminal state. It is also defined as
an Exit state. When this block is encountered during
the enumeration, no transition is required because the transition
is automatically set to the final state. It is necessary
to include the second subset so that the other states will
be included in the analysis. |
| |
|
Enumeration |
| |
The state list is similar to the Markov Chain model, but a final
state (state 16) is included. Whenever one or more states are
indicated as exit states, the final state will be added to the
list.

The action list has four alternatives. The cost column is irrelevant
to the model, since action costs are determined by a matrix.
We will see the link costs as decision costs for this model.

|
Decisions |
| |
For the DDP problem, transitions are shown
in the Decision List. A decision is described by a
state and an action. The transition blocks are similar
to other models of this class with the blocks of two types.
The first four blocks describe balk or wrap transitions. A
balk occurs when a move is taken in a direction restricted
by a wall. With a balk the state does not change. This is illustrated
by the first decision in the in the Decision List where
the move north is restricted. The second four transition blocks
describe moves that change the state. The second on the list
is an example. The first 28 decisions are shown below.
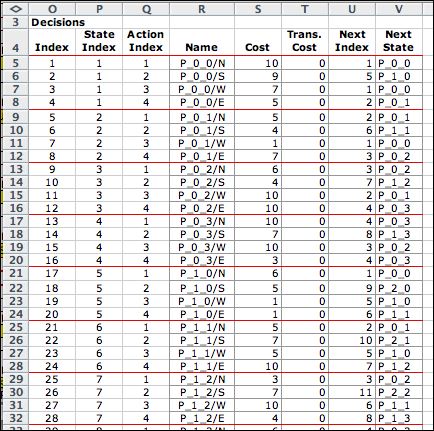
The last few decisions on the list illustrate an exit state.
Row 61 shows the transition to the final state with the associated
transition cost. The final state is added as state 17.

When the wrap option is in chosen a movement toward
the boundary is not limited. An action moving toward the boundary
results in the walker moving to a state adjacent to the opposite
boundary. If the wrap option had been selected for this example,
the action of moving north from state (0,0) results in a transition
to state (3,0). |
Call Solver |
| |
The DDP model uses the DP
Solver to find solutions. The solution is below with the
optimum recovered for state 1.
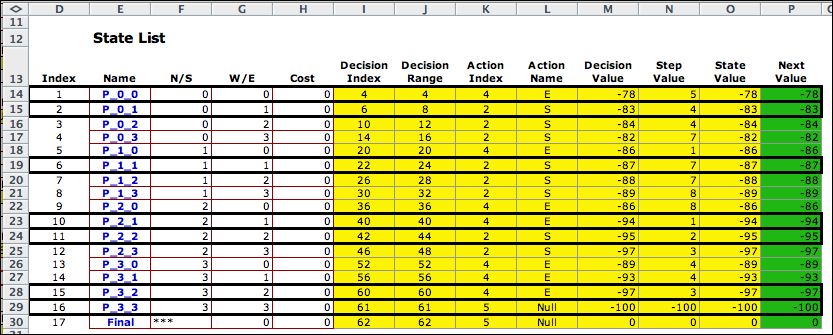
Column L gives the optimum solution for each
state as pictured below. The collection of actions is the optimum
policy. The solution is the shortest path tree rooted at (3,3).
|
Summary |
| |
This page has demonstrated
the DDP model for the grid walk problem. The DP
Data add-in constructs a table holding the data.
By clicking the Build Model button
on the data worksheet, the DP Models add-in constructs
the model worksheet and fills it with the constants and
formulas that implement the model. By clicking the Transfer
to DP Solver button,
the DP Solver add-in creates the solution worksheet
and transfers the information from the list worksheet. All three
add-ins must be installed for all the steps to work.
The solution algorithm implemented by the Value Iteration
method does not require that the solution determine
a tree. Every state has one of the four movements assigned,
but there is nothing that restricts some subset of the states
to be connected by a cycle of links. This will happen if
the sum of the costs around some cycle is negative. In this
case the solution does not converge. The values of the states
on the cycle are unbounded from below. If there are no cycles
with negative total cost, the state values will
converge and the optimum policy will describe a tree. |
| |
|
|