The estimates of the model parameter,
 ,
for three different values of m are shown together
with the mean of the time series in the figure below. The figure
shows the moving average estimate of the mean at each time and
not the forecast. The forecasts would shift the moving average
curves to the right by ,
for three different values of m are shown together
with the mean of the time series in the figure below. The figure
shows the moving average estimate of the mean at each time and
not the forecast. The forecasts would shift the moving average
curves to the right by  periods.
periods.
One conclusion is immediately apparent from the
figure. For all three estimates the moving average lags behind
the linear trend, with the lag increasing with m. The
lag is the distance between the model and the estimate in the
time dimension. Because of the lag, the moving average underestimates
the observations as the mean is increasing. The bias of the
estimator is the difference at a specific time in the mean value
of the model and the mean value predicted by the moving average.
The bias when the mean is increasing is negative. For a decreasing
mean, the bias is positive. The lag in time and the bias introduced
in the estimate are functions of m. The larger the
value of m, the larger the magnitude of lag and bias.
For a continuously increasing series with trend
a, the values of lag and bias of the estimator of
the mean is given in the equations below.
The example curves do not match these equations
because the example model is not continuously increasing, rather
it starts as a constant, changes to a trend and then becomes
constant again. Also the example curves are affected by the
noise.
The moving average forecast of
periods into the future is represented by shifting the curves
to the right. The lag and bias increase proportionally. The
equations below indicate the lag and bias of a forecast
periods into the future when compared to the model parameters.
Again, these formulas are for a time series with a constant
linear trend.
We should not be surprised at this result. The
moving average estimator is based on the assumption of a constant
mean, and the example has a linear trend in the mean during
a portion of the study period. Since real time series will rarely
exactly obey the assumptions of any model, we should be prepared
for such results.
We can also conclude from the figure that the
variability of the noise has the largest effect for smaller
m. The estimate is much more volatile for the moving
average of 5 than the moving average of 20. We have the conflicting
desires to increase m to reduce the effect of variability
due to the noise, and to decrease m to make the forecast
more responsive to changes in mean.
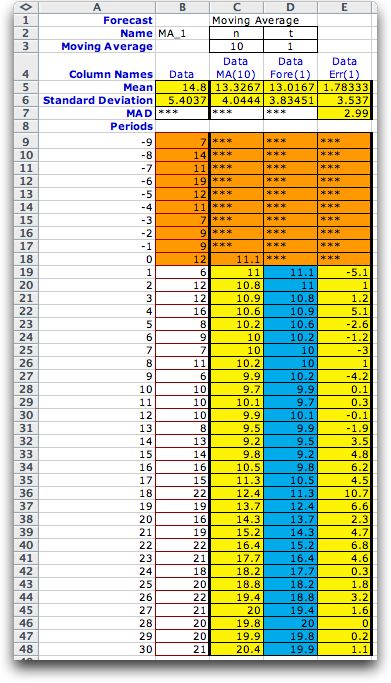
The error is the difference between the actual
data and the forecasted value. If the time series is truly a
constant value the expected value of the error is zero and the
variance of the error is comprised of a term that is a function
of  and a second term that is the variance of the noise,
and a second term that is the variance of the noise,  . .
The first term is the variance of the mean estimated with a
sample of m observations, assuming the data comes from
a population with a constant mean. This term is minimized by
making m as large as possible. A large m makes
the forecast unresponsive to a change in the underlying time
series. To make the forecast responsive to changes, we want
m as small as possible (1), but this increases the
error variance. Practical forecasting requires an intermediate
value. |