|
Value iterations
find the optimum actions at each step for a finite sequence
of steps. As the iterations progress, the policy converges
to the optimum for the infinite horizon problem. The state
NPW values and probabilities converge to the values
for the optimum policy. Several vectors describe the states
of the system.
The previous page found the NPW and probability
vectors for a specified action policy. On this page we try
to find the infinite-horizon optimum policy and the corresponding
NPW and probability vectors. |
Value Iterations when the Policy is not Fixed |
| |
For these iterations the action is optimized
at each step. The equation below solves for the optimum
action at each state based on the state NPW computed in
the previous step. There are N independent optimization
problems and each is solved by enumerating all possible actions.
The optimum policy is the one that obtains the minimum NPW
for each state.

|
| |
|
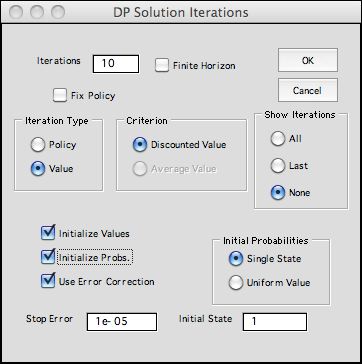
The add-in performs the required
minimization with Value iterations. When the Fix
Policy button is not checked, the policy is optimized
at each iteration.
For these iterations we click
the Value button on the dialog. The Show
Iterations selection
indicates whether intermediate results are to be saved.
The Final Value and Initial Probabilities options
determine the starting conditions for the process.
Again we use the Bulb replacement problem for the example. |
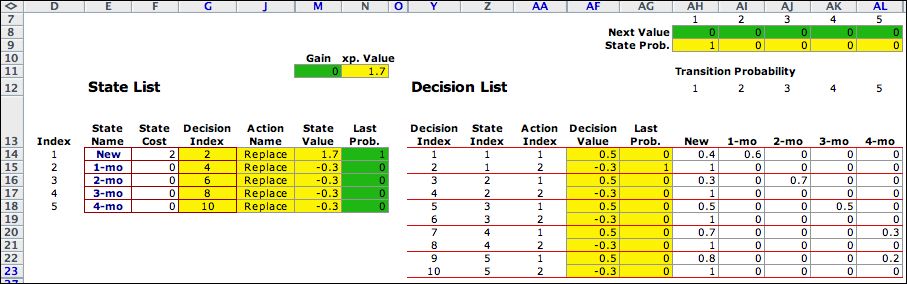
Step 0 holds
the solution with the initial values specified. Note that column
G contains indices from the Decision List.
The decision list has a row for each state and action combination.
For this case there are five states and two actions per state.
Thus we have ten rows in the decision list. The transition
probability matrix has ten rows and five columns. The indices
in column G point to the rows that define the optimum actions
for the first step. Thus we see in G14 the index 2, and that
row in the decision list shows the action to be 2 when in state
1. The other rows indicated in column G are 4, 6, 8, and 10.
We can see from these rows that the optimum is to follow action
2, the Replace action in every state. The optimum
depends on the entries in the green range of row 8. These are
the initial NPW values specified by the dialog.
By using only the rows specified by the optimum decision index,
the matrix of transition probabilities has only 5 relevant
rows and 5 columns. This matrix determines unique state values
and state probabilities for the initial step. |
|
| |
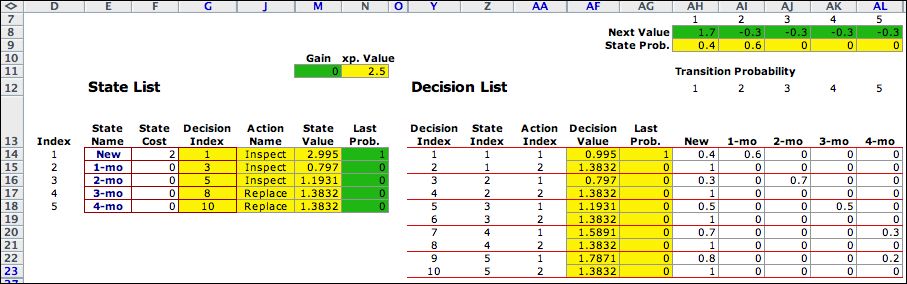
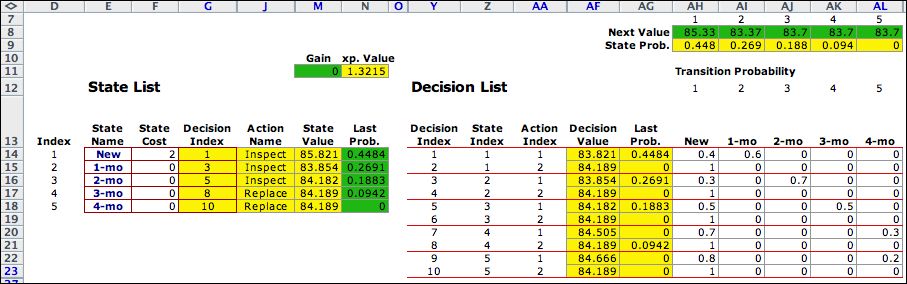
To make an iteration, the program
copies the State Value vector (column M) and pastes
the transpose of the values into the vector Next Value (row
8). Similarly the program copies the vector State Prob. (row
9) and pastes the transpose of the values into the vector Last
Prob. (column N). The
results are shown below.
|
|
| |
The program automatically discovers
the optimum policy to inspect while in states 1 through
3, and to replace when in states 4 and 5. The optimization
step is automatically accomplished with Excel formulas in the
yellow ranges of the worksheet. The VBA code of the add-in
performs the copy and paste operations described
in the last paragraph to implement an iteration.
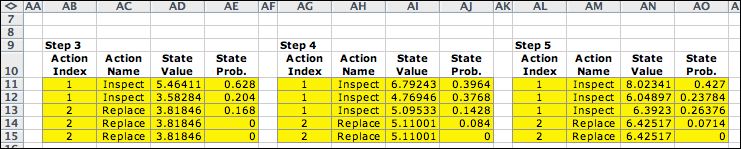
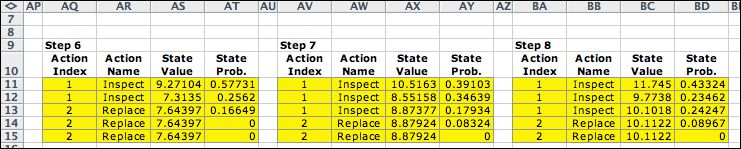
The
program continues through 8 iterations to obtain the sequence
of results shown below. The state values and state probabilities
change at each step. The policy appears to converge to the
policy shown for step 8. Although the values and probability
vectors seem to be converging, the results have clearly not
obtained the steady-state values. |
|
| |
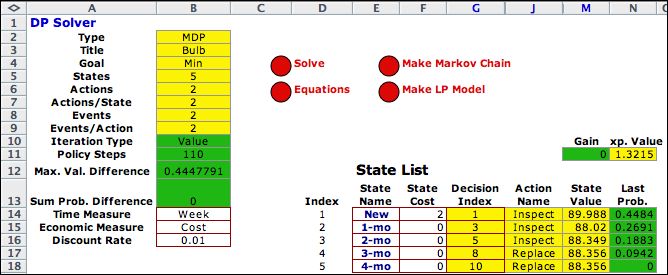
The values after 100 more steps
indicate that the probabilities are very close to steady-state.
While the state values are close, they still have
not converged to their limit. This is typical with the value
iteration process. The optimum action is found rather early
in the iteration sequence, however the NPW values take a long
time to converge. The probabilities converge rather quickly
for most problems. |
|
| |
Note that the optimum actions select
the rows 1, 3, 5, 8, and 10 from the decision list. When extracted
from the decision list these rows define a Markov Chain. |
Markov Chain |
| |
The figure below shows the upper
left corner of the worksheet after 110 iterations. Click on the Make
Markov Chain button to build a Markov Chain model. The Markov
Analysis add-in must
be installed for this to be accomplished. |
|
| |
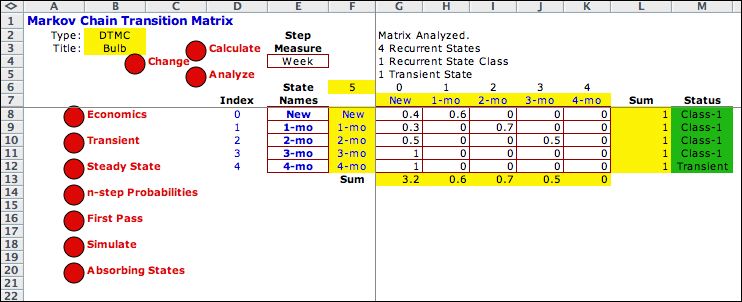
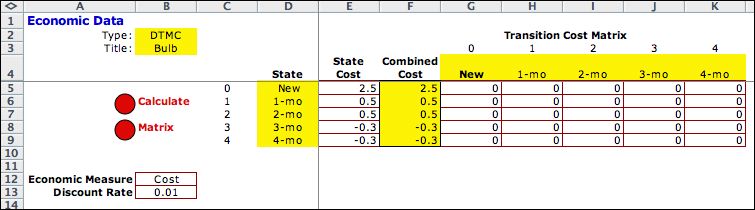
The selected rows are transferred
into the DTMC matrix. The cost data and discount rate are
transferred to the
Economics page. After analysis, states 0 through 3
are identified as a single class of recurrent states. State
4 is a transient state. Note that the Markov Analysis
indices start at 0 rather than 1 as for the DP Solver page. |
|
| |
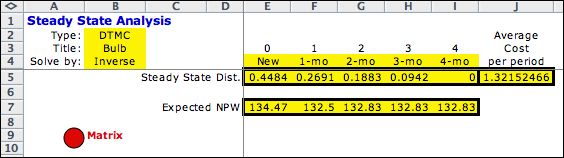
Steady-state analysis of the Markov
Chain produce the results below. The steady-state probabilities
are quite close to the results obtained with the DP Solver. The
expected NPW values are quite different since convergence of
the state values is slow. Another 1000 iterations will find the
two results to be much closer. |
| |
|
| |
Markov Analysis is often useful to analyze
the policy obtained with the DP Solver add-in. In addition
to steady-state analysis, the Markov Analysis add-in allows
several other useful tools. The next page considers
the Policy iteration
method. This method finds steady-state values that are the
same as those obtained with Markov Analysis.
|
| |
|