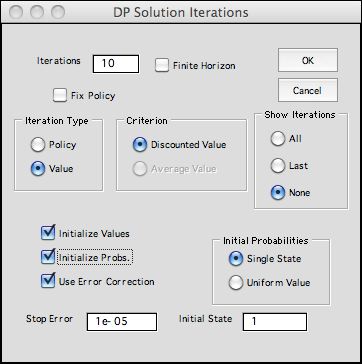
The dialog on the left appears
when you click the Solve button on the Solver worksheet.
We use it here to illustrate the options
available in the DP Solver add-in. We discuss each option on
the following pages. Although you may not be acquainted with
all the methods, we provide some introduction on each page.
The first field accepts the number of iterations of the
chosen solution method. The problem can be one that models
a finite horizon problem, when the Fixed Horizon button
is checked, or
infinite horizon problem. When
the Fix
Policy button is unchecked, the algorithm searches for
the optimum policy. When checked the algorithms evaluate
a given policy.
Two solution methods are available, either the policy or
value method. The criterion
depends on whether
the problem is discounted or not. For a discounted problem
some nonzero interest rate is provided, and the criterion is
the discounted present worth. When the discount rate is zero,
the criterion must be either the total value (the discounted
value with 0 interest rate) or the average value per step.
There are three options for showing intermediate results:
all iterations, only the last iteration or no iterations.
The iterations may begin with initial values or
may continue from some advanced solution. The error correction
method is used for faster convergence of the values for an
infinite horizon problem. The Stop Error field holds
the value of the value error estimate that causes the value
iterations to terminate. |