|
|
 |
Stochastic
Programming |
 |
-
Chance Constraints |
|
One way to find a solution that explicitly represents uncertainty
is to use chance constraints. Again we use the deterministic
solution as a starting point.
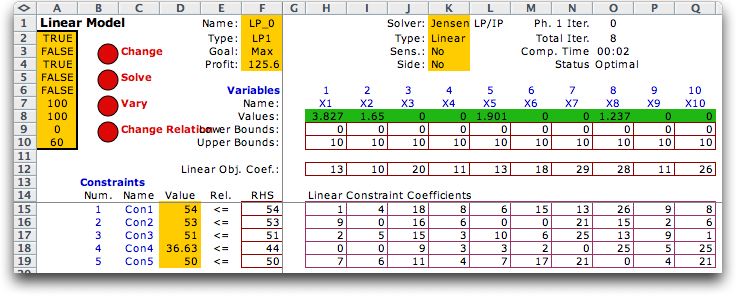
On a previous page, we discovered that the solution below is not satisfactory
if the RHS values are random variables. When the RHS values
vary about the mean values according to a
Normal
distribution
with a standard deviation of 10, the solution
is feasible only about 5% of the time.
One way to find a solution that
has a greater feasibility probability is to make the RHS vector
smaller. All random variables considered on this page are statistically
independent. |
|
| |
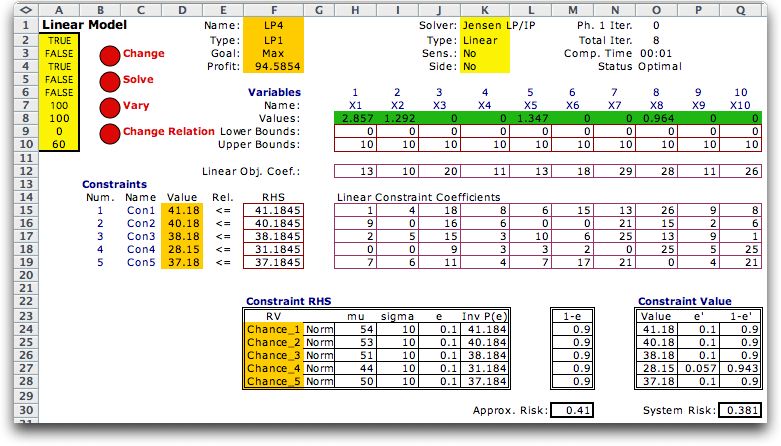
One way to provide values for the RHS with
known risks of infeasibility is to use the Inverse Probability function
of the Random Variables add-in. The worksheet below
shows our LP model and also five probability distributions
created by the random variables add-in. The random variables
are defined in the outlined range starting in row 23. The parameters
of the distributions are in columns H and I. We have placed
the desired risk of 10% in column J. Column K holds the inverse
probability values. For example, there is a 10% chance that
the RHS for constraint 1 will fall below 41.1845. This number
is computed in cell K24 with the expression:
=RV_inverse(Chance_1,J24)
The number is transferred to the LP model with a formula in
cell F15:
=K24
In the figure below, each RHS is set to a value so that there
is only a 10% probability of violating
each constraint
individually.
This is easily accomplished by setting the values in the range
J24:J29 to 0.1. The deterministic solution shown
is optimal for the RHS values shown. The objective value is
94.6. This is quite a bit less than the value of the expected value
solution, 125.5, but this solution has a much greater probability
of feasibility. |
|
| |
Although the probability of violating
each constraint is only 10%, the probability of violating at
least one of
the six constraints
is considerably greater. An estimate of this probability is:
The system risk is computed in cell M30 of the
worksheet. The estimate is an upper bound because some constraints
may not be tight at the optimum solution, for example, constraint
4 is loose. The estimate for the risk is 0.41
for the present case.
A better measure of system risk is computed at
the right bottom of the figure. Here the constraint values
obtained by the solution are used to compute the probability
that the constraint limits will fall below the values obtained
by the solution. The probabilities for the individual constraints
are computed as e'. Assuming independence the system
risk of 0.381 is computed with the expression.
|
Levels of Risk |
| |
Different solutions may be obtained with different
levels of risk. Several solutions are presented below with
increasing objective values and increasing risk. The constraint
risk is the number used to determine the RHS values,
and the system risk is the probability
that the solution will violate at least one constraint. Any
number of solutions could added by selecting different values
of risk
for the several
constraints.

In this example, the RHS values are independent random variables
and we have included chance constraints for each individual
constraint. Since the analyst is probably interested in finding
a solution with a given system risk, it would be useful to
construct a single constraint that assures this result. This
is called a joint chance constraint. Unfortunately,
this constraint is not easy to write. For simple cases, it
may be possible to write the constraint, but the resultant
model is not a linear program. In fact, the feasible region
of the resultant model is probably not convex, making the model
difficult to solve.
Even if we use only individual chance constraints, there is
no general guidance on how to set the risks of constraint violation.
The chance constraints do give the analyst a method for explicitly
recognizing uncertainty. |
Different Forms |
| |
The mathematical model of an LP with chance
constraints can be written as below.
As noted above the probability statement can be
replaced with a linear constraint with the RHS replaced a constraint
evaluated by the inverse probability function. A different form
is required for a ">=" constraint. For an
equality constraint there is no chance that the constraint
will be satisfied for any given solution. So the risk is always
100% for an equality constraint for continuous probability distributions.
We have considered on this page only randomness
for the RHS values. When constraint coefficients are random,
the situation is more complex.
|
| |
|
|