|
|
|
|
| |
Actions are required for the deterministic
dynamic programming models and the stochastic
dynamic programming models (or the Markov decision problem).
Every state, except an Exit state, admits one or more actions.
Models with actions are optimization problems where the goal
of the optimization is to minimize or maximize an objective
function that depends on the sequence of actions.
In many ways the set of actions is similar to the set of
states. The actions come from a finite set with each element
of the set defined by a vector of integer variables. Actions
always occur while the system is some state. The set of feasible
actions and the objective contribution (or cost) of the action
depend on the particular system state. For our
models, however, we require that feasible actions
be enumerable without recourse to the state. Thus we define
an action element whose members depend only the lower and upper
bounds of the action variables and perhaps additional logical
conditions on the action variables.
Our models allow the objective contribution of
the action to depend on the current state. The combination
of a particular state and a particular action is called a decision.
We provide Decision Blocks where each
block represents a subset of state/action combinations. Each
subset can have a specified objective contribution and an indication
of feasibility. If a given decision (state/action combination)
is not included in a defined subset it is not included in the
analysis. |
The Action Element |
| |
Actions
are defined in
the action element.
It is located just to the right of the state element.
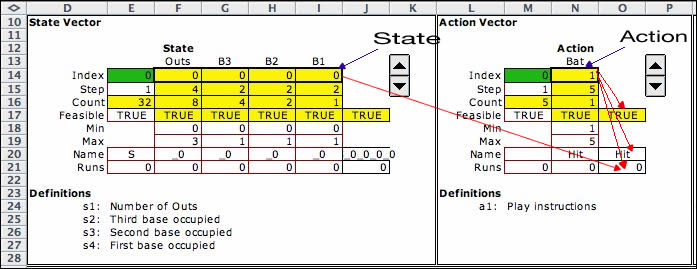
The figure shows the state and action elements for the Baseball problem.
The action element is identical in form to the state element.
The baseball action has a single variable that
holds the play instructions given by the coach. There are
five possible instructions indicated by Min and Max bounds
in rows 18 and 19. The current
action is in cell N14, the integer 1 indicates the hit instruction.
The remainder of the cells in this element play the same roles
as they do for the state element. Row 21 describes the objective
contribution for the action. The default is a linear function
of the action variables. For the example, row 21 contains
only zeroes. In general the values in row 21 can depend on
both the state and the action.
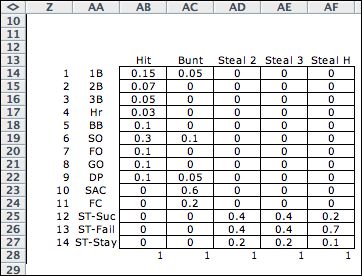
The set of available actions is found elsewhere
on the worksheet in the data table shown below. The action
titles are in the range (AB13:AF13). Cell N20 in the action
element gets the action names using an INDEX function that
points to this range. The rest of the data table gives information
about the events of the situation.
|
Decision Subsets |
| |
The model allows decision
subsets. The
combination of a state and an action defines a decision. It
is often convenient to use several decision subsets to indicate
the feasibility or infeasibility of specific decisions. Also
the objective function contribution may differ between subsets.
Certain decisions may be identified as Exit decisions.
An exit decision prescribes an immediate transition to the Finish state.
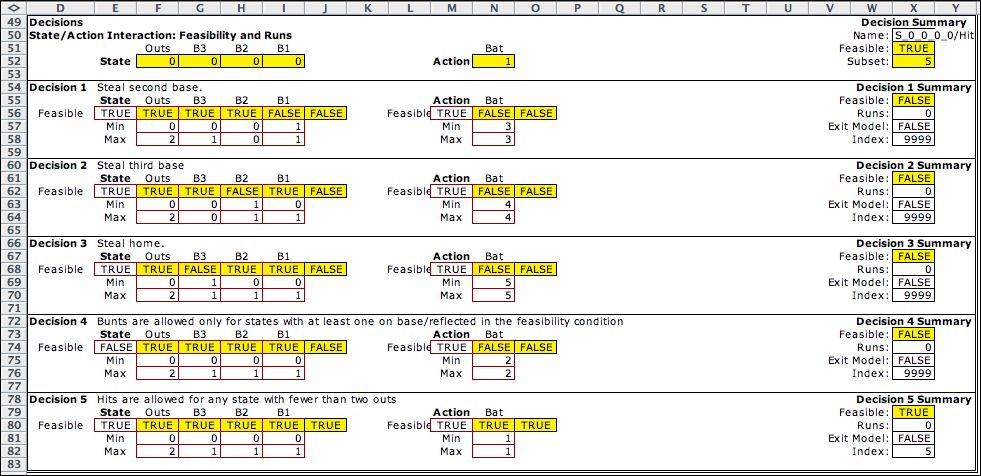
The baseball
model uses five decision subsets designed to restrict
the set of states that allow specific actions.
They are pictured below. The subsets begin with a header region
in rows 49 through 53 where the current state and current action
are displayed. It holds the same state and action that appear
in row 14 at the top of the page. The summary region in column
X holds the name of the decision which is a concatenation of
the state and action names. The value TRUE in S51 indicates
that this decision is a member of one of the decision subsets.
The value in X52 is the index of the subset that is feasible
for this decision. The subsets must collectively include all
feasible decisions. They need not be mutually exclusive. When
a state falls in more than one subset, the one with the smallest
index is indicated in X52. The current decision, S000/Hit is
feasible and it is included in the fifth subset.
The subsets each occupy a range of the rows below the header.
For example, Decision 1 defines the subset of decisions that
allow the player to steal second base. For that decision to
be feasible, the state must have first base occupied, B1=1,
and second base empty, B2=0. The action "steal second
base"
is action 3. The logical condition and the bounds in columns
E through I and M through N identify decisions that represent
this situation. Since the current state has first base empty,
B1=0, the conditions fail for this decision. Also the action
index is 1, not 3. This result is reported in X55. X56 has
the default value that is the action objective
term. The formula in this cell can be changed to allow any
function of the state and action. Cell X57 indicates that the
decisions in this subset are not exit decisions. Cell X58 returns
9999 for an infeasible subset, and returns the index 1 when
the subset is feasible.
|
|
| |
The first three subsets
identify decisions for stealing bases.
Decision 4 allows the "Bunt" action only if there
is at least one runner on base. This condition is described
by a logical expression in E74:
=(G52+H52+I52)>0
This is true only when the sum of the base-state
variables is greater than 0, or there is at least one runner
on base.
The last decision subset allows the "hit" action
for all states with two or fewer outs. The conditions for this
subset are satisfied by the current decision and we say the
decision is feasible.
It is not necessary to provide a decision subset
for states with three outs since these have been previously
been designated exit states. Exit states are assigned the decision
"Null" since they require no decisions.
It is not required that decisions subsets be
defined, but if one or more are used, then every feasible decision
must be included in at least one decision subset. The change
command allows the number of decision subsets to be increased
or decreased, but will only allow additions if at least one
is provided in the initial model setup. When no decision subsets
are defined the set of decisions is determined by all possible
combinations of feasible states and feasible actions. |
Enumerating the Actions |
| |
The DP Models add-in
enumerates all actions defined by the action element. On the
BB_Lists page column N holds the single state variable value.
This happens to be the same as the index. Column O holds the
objective function contribution for each action when the state
vector is at its lower bound. In general if the decision contribution
depends on both the state and action, column O plays no bearing
on the model. It is useful for debugging when the action cost
does not depend on the state.
. |
Enumerating the Decisions
|
| |
The enumeration process
firsts enumerates all feasible states and then enumerates all
feasible actions. Then each action is combined with each state
to find the complete set of decisions. The MDP optimization
will select the optimum decision for each state, so it is important
the entire set of feasible decisions be enumerated.
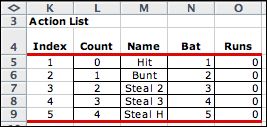
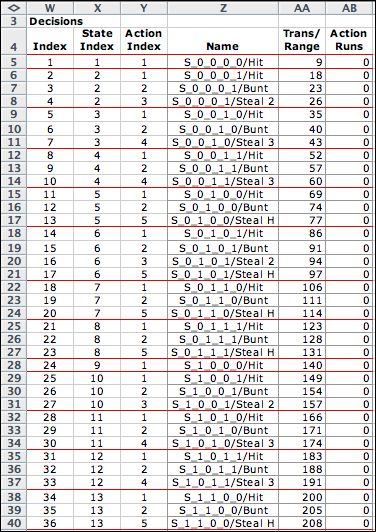
Given a state and an action, the resultant decision
is included in the model if the decision falls in one of the
subsets. Otherwise it is not included. The decision list for
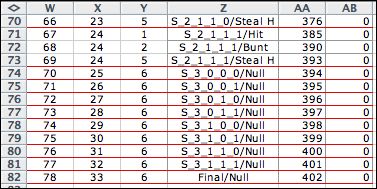
the example is shown in part below. The example has 78 feasible
decisions. At the top of the list we see that the state with
all bases empty and no outs admits only the hit action. The
state with no outs and first base occupied allows the hit,
bunt and Steal 2 actions. |
| |
|
| |
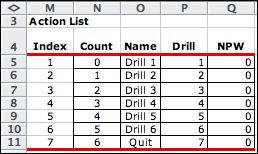
At the bottom of the
list we see the states with three outs. Three outs signal the
end of the inning. The state subsets define these as
exit states. No decisions are enumerated for the exit states.
Rather a single decision is indicated by the Null action.
When a state and action combination has no feasible decisions,
the action "NA" is assigned to the state. The objective
contribution for the NA action is a very large positive number
for a minimization problem and a very large negative number
for a maximization. When the optimum solution is determined
using the DP Solver, states with no feasible actions are avoided
if possible.
The next page addresses the model component called transition.
These determine the changes in state that are engendered by
the selection of a decision. |
Other Examples |
| |
All optimization models include
the action and decision components. This includes deterministic
dynamic programming and MDP models. Some examples are below. |
| |
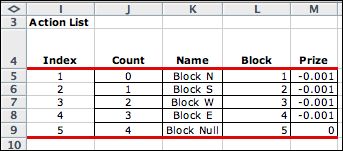
The Doors problem
is a random walk model with a single action variable representing
the action of blocking movement in one of the four directions
or not at all. There are no decision subsets defined, so the
decision set includes all state/action combinations except
for the two exit states.
|
|
|
State P_0_0 is an exit state allowing only the Null action.
The objective contribution in column Z is defined by the
formula in cell M21. |
|
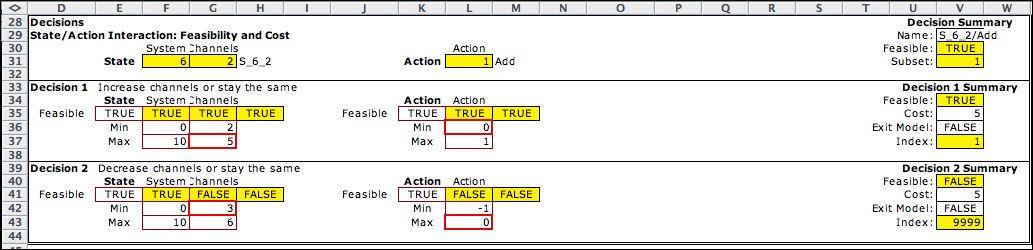
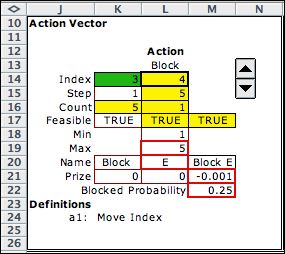
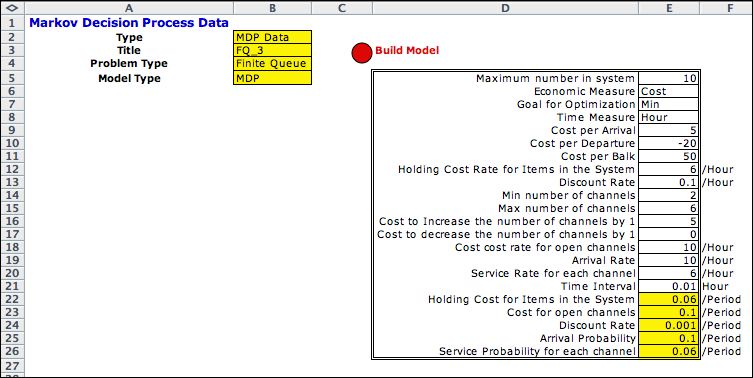
The Queue MDP
has one action variable indicating whether to decrease the
number of service channels, leave it the same, or increase
the number of channels. The cost of the action is computed
in cell M21 and is independent of the state.
The two decision blocks allow additions and subtractions
to the number of service channels.
|
| |
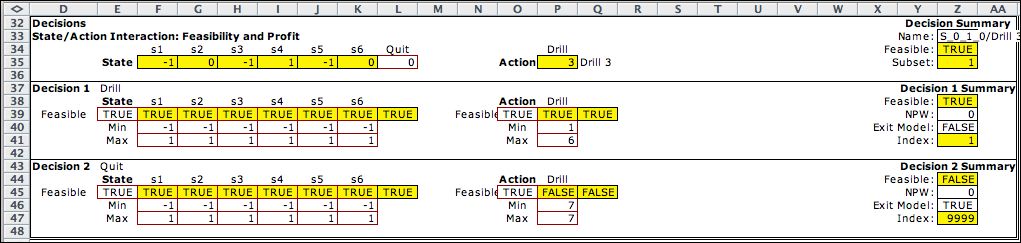
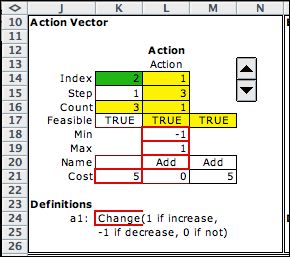
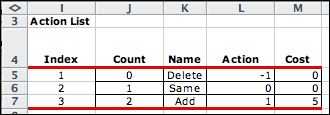
The Sequencing model
describes the oil well sequencing problem. It involves six
well locations and the decision problem is to find the optimum
sequence to drill the wells. The action chooses the next well
to drill or alternatively to quit before the sequence is complete.
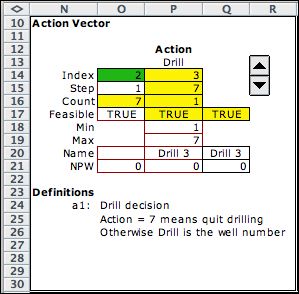
The first decision block allows a selection of
a well index (from 1 to 6). The states are not limited by the
bounds in rows 40 and 41, but there is a formula in cell O39
that returns TRUE only if the corresponding cell in the state
vector is -1 (not drilled). For the example the Drill 3 action
is feasible because the value of s3 is -1. This means that
site 3 is not yet drilled. The second decision
set is an illustration of an exit decision. If the action is
to quit (action 7), the decision will go directly to the Final
state. |
|
| |
|








{kind=link}