|
|
 |
Mathematical
Programming |
 |
Side
Model |
| |
The form of the math programming model provided by the Math
Programming add-in
is not very efficient for a problem with a large set of variables
where each variable in the set appears in one or a very few
constraints. For
this kind of problem, we provide a second model structure that
is placed on the same worksheet as the original model structure.
Traditional math programming gives the name side constraints to
constraints that are in
addition to those of a master model structure. In this
spirit we call the model described on this page the side
model.
The side model can identify new variables and new constraints.
The side model can only be used if one of the other model
forms, linear, nonlinear, network flow or transportation, has
already been constructed on a worksheet using the procedures
described earlier in the Math Programming section. We call
the problem described by the original model the master
problem.
The side model is a series of one-line
models. The one-line models
are called subproblems. Each subproblem occupies
cells on a single row of the Excel worksheet. Cells on the
row contain all the
variables and constraints for the subproblem as well as
parameters
and coefficients sufficient to define the model. The side
model can have a large number of rows to represent
a whole series of similar subproblems. The subproblems
are linked to the original model by variable values
transferred
by equation from the master problem. We will see that a very
large model can be constructed with a relatively small number
of cells on the worksheet. We can use the Excel Solver to
solve these problems, but only models of very limited size
can be solved with the free Solver available with Excel. The Jensen
LP/IP Solver has recently been modified to implement the L-Shaped method
so that quite large models may be addressed. The L-shaped
method is
a decomposition method for solving problems with side constraints.
The side models are very useful for stochastic programming
models, models that involve piece-wise linear approximations
and models that include fixed charge variables. Several examples
are presented in the first three pages. The L-shaped method
is on the two remaining pages.
|
The Block Diagonal Form |
| |
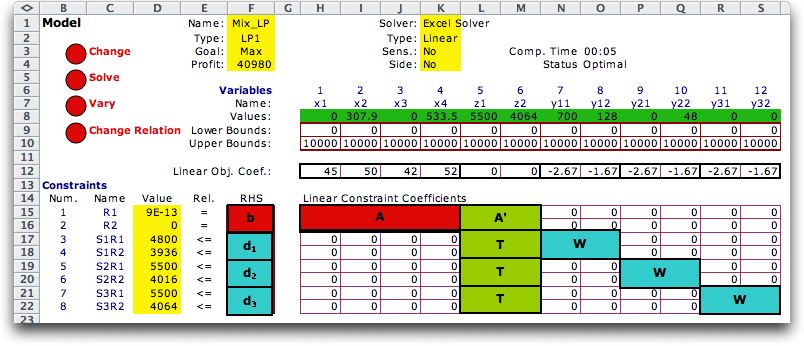
An LP is presented below with the form that
suggests that a side model might be useful. In the figure below,
the colored regions in the constraint coefficients may contain
nonzero numbers, while the cells outside these regions contain
all zeros. The constraints of this model have the block
diagonal form. There is a set of variables x that
are related by the first two constraints through the matrix
A.
The variables in z are also included in this
set of constraints via the matrix A'. The
following six constraints contain z and the
variables labeled y11, y12, etc. In the following we call
these variables yk where k=1,
2 or 3. These
constraints contain nonzero coefficients in the matrices T and
W. The constraints can be divided into sets
so that y1 appears
in the first, y2 appears
in the second, and so on. The
matrix T multiplies z in
each set, and the matrix W multiplies yk.
The lower bounds, upper bounds and objective coefficients are
similarly partitioned. The RHS values of the constraints are
also partitioned in this fashion into b, d1, d2 and d3. |
|
| |
The full matrix representation of a problem
with the block diagonal form is not efficient because of the
large number of zero's in the matrix. Although 0's do not affect
the efficiency of the Solvers significantly, the large matrix
consumes many cells of the Excel worksheet. The number of cells
grows as the product of the number of variables and the number
of constraints. Entering the nonzero data is difficult because
it is hard to keep track of rows and columns. In the form presented,
the number of variables is limited to the number of columns
of the worksheet (the maximum is about 250). Numbers associated
with data lists outside the form are not identified with regard
to source thus making the model difficult to check and maintain.
These difficulties magnify as the number of blocks in the diagonal
form increases.
The form is also called the L-Shaped form because
the nonzero entries roughly resemble an inverted L. The matrix A comprises
one bar or the L, while the matrix to the right of A comprises
the other bar. |
Side Model |
| |
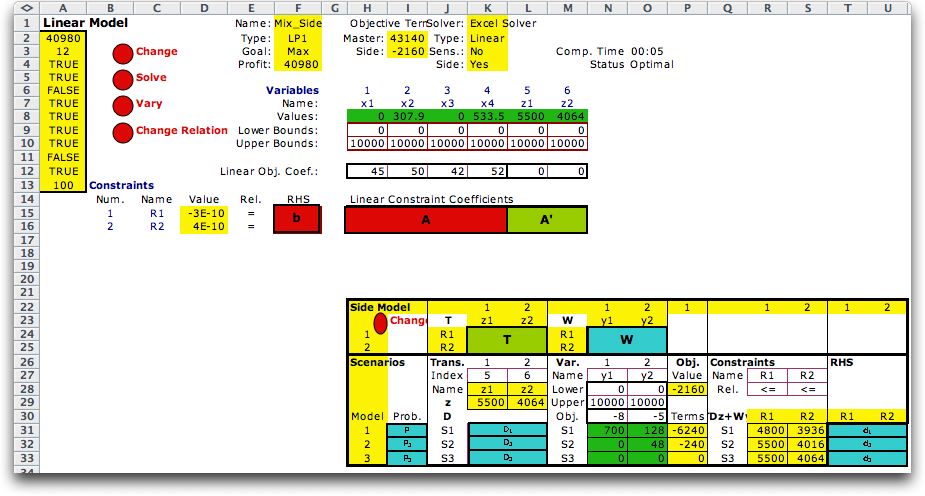
The side model shown below provides a more
efficient representation that does not include all the 0's.
The model at the top of the page (through row 16) is master problem. It
describes the first two constraints with the variables x and z.
The side model starts in row 22 and contains the information
describing the subproblems. The linking variables, z,
and the associated matrix T is in columns
J through L. The linking variables are identified by the indices
in cell K27 and L27. The names and values of z1 and
z2 are transferred through equations
in the range K28:L29. The subproblem variables, bounds and
objective coefficients and the matrix W appear
in columns N and O. The variable values are in the green range
N31:N33. These are determined by the Solver. The objective
function for the side model is computed in column P. The objective
terms are weighted by the numbers in column I. The constraint
values, names and relations are in columns R and S. The RHS
values are in columns T and U. |
 |
| |
At the top of the page we see the objective
function contributions of the master and subproblems in cells
I2 and I3 respectively. These are totaled in cell F4. The value
of cell F4 is maximized by the Solver. |
Notation |
| |
The options are more easily discussed when
we define notation for problems with the block diagonal form.
The general problem is at the left. The model expressed with
subproblems is at the right. For simplicity, the forms are
shown with equality constraints, however, they can be expressed
as inequalities as well. We show all lower bounds to be zero,
but the forms allow nonzero or negative lower bounds. We show
a linear programming model, but the side model can also be
attached to nonlinear master problems, network flow models
or transportation models. The side models may include nonlinear
terms in the objective function.
After a master problem has been placed on a worksheet, a side
model is constructed by selecting the Side Model item
from the Math Programming menu. The dialog below is
presented.
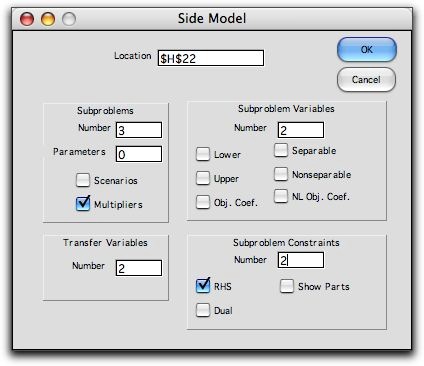
The dialog presents options that determine where the side
model is placed on the worksheet and the features that are
to be included as specific data columns. The cell at the upper
left corner of the side model display is indicated in the Cell field.
The Subproblems field holds the number of subproblem
rows to be included in the side model. Parameters indicates
how many columns are to be included to hold parameters of the
subproblems. It is often useful to have all relevant parameters
entered in these columns, but the parameters can be entered
directly in the data columns describing the subproblems. Transfer is
the dimension of the linking variables z. Variables is
the dimension of the subproblem variables yk. The Constraints field
holds the number of constraints in each side problem. The buttons Lower, Upper,
and Obj indicate whether specific columns are to be
dedicated to these values. If not checked the values are provided
by single cells that pertain to all the subproblems. Separable
Nonlinear includes columns for separable objective function
terms and their coefficients. Nonseparable Col. includes
a column for nonseparable nonlinear terms. RHS button
includes a columns to hold a different RHS value for each subproblem.
Otherwise a single value is provided to pertain to all subproblems.
The Show Parts button provides a column for the value
of TDkz another
for Wyk.
We illustrate a variety of options in the example problems
that follow.
Although the example shows a common matrix T for
all subproblems, it is often useful to have different matrices
for the different subproblems. This is provided by the matrix Dk that
varies by subproblem. In matrix notation, Dk is
a diagonal matrix that multiplies T. The effect
is that the transfer matrix can then be varied by subproblem.
Since only the diagonal elements are relevant they are stored
on our form in each subproblem row. Although not every situation
can be handled using these matrices, we will find that they
are very useful for some applications. For applications that
have a constant transfer matrix T, the values
in the cells are all set to 1. Then D is an
identity matrix.
|
| |
|
|